robosen report
試験&開発レポート




NEDO「2024年度 SBIR推進プログラム事業(連結型・フェーズ1)」に採択(2024年)
株式会社ロボティクスセーリングラボ様との共同事業が、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「2…




3
m以内
全環境下での定点維持範囲
20
m
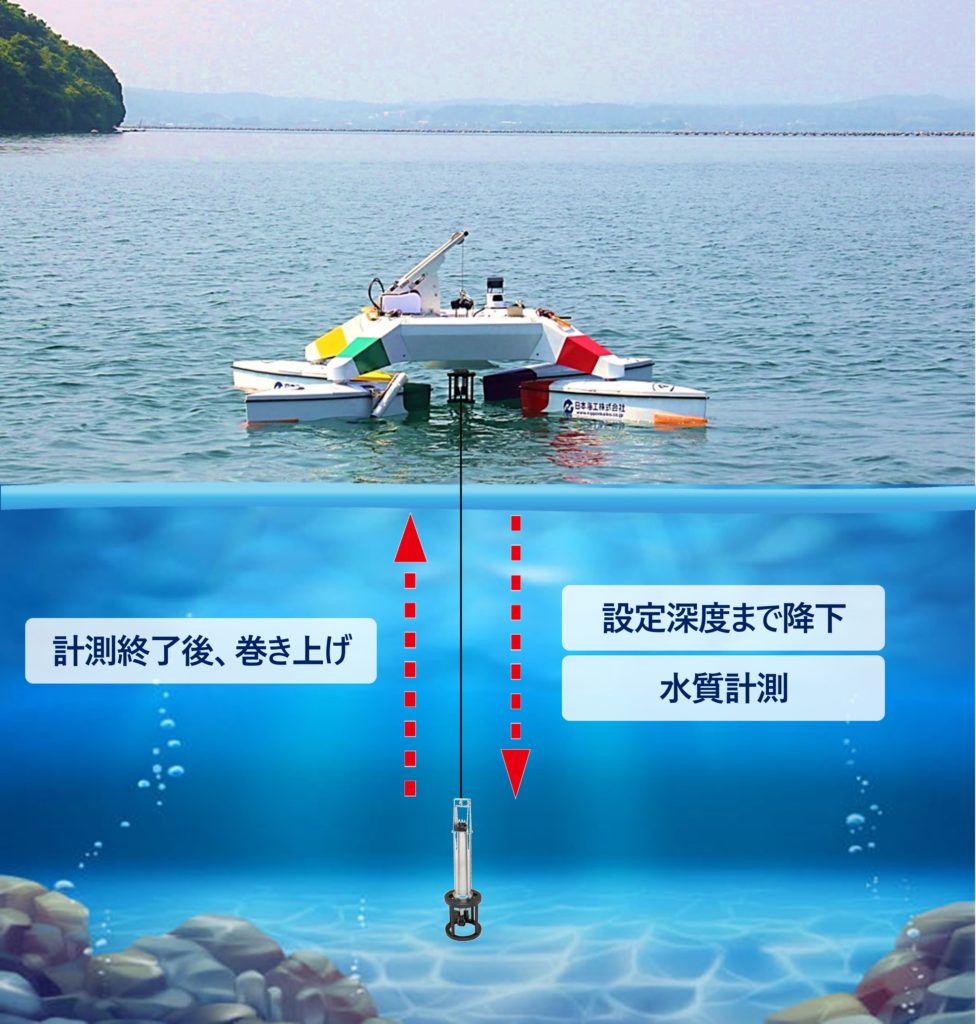
探索深度
99999
使用用途は無限
16
時間
連続稼働