ロボセンによる自動水質計測では、観測ポイント到達後に昇降装置に搭載する水質計測器を所定深度まで降下し、計測終了後、水質計測器を気中まで巻き上げてから次の計測ポイントまで移動します。
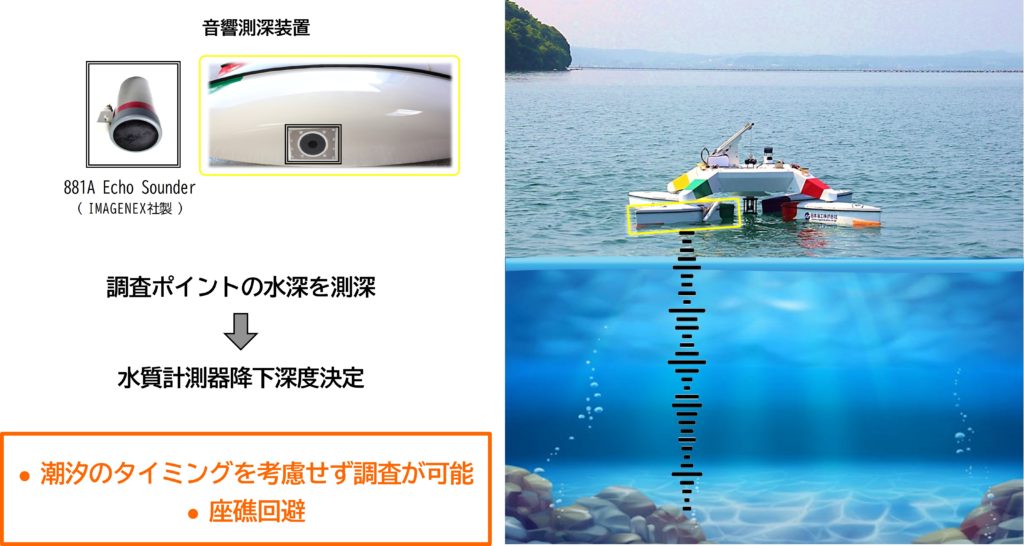
潮汐の変化を考慮した水深を把握するためにロボセン船体に音響測深器を埋込式で搭載し、観測ポイント到達時に直下の水深を測り、測深データによって水質計測器の降下深度を自動で設定するシステムを開発しました。
これにより、計測ポイント直下の水深をリアルタイムに把握できるため、複雑に起伏する海底においても鉛直方向の水質データを取りこぼすこと無く取得でき、岩礁や沈降物との接触トラブルを回避することも可能になりました。