OCEANS’18(2018年)
2018年5月29日から31日の3日間、神戸コンベンションセ …
2018年5月29日から31日の3日間、神戸コンベンションセ …

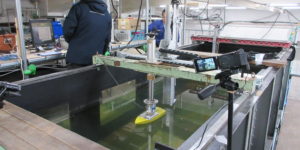
目的ポイントでの水質環境計測時に風や波、潮流などの外乱により …

石川県七尾湾の牡蠣養殖場にてロボット船の実海域実験を実施。 …
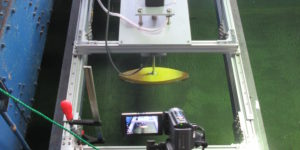
航続距離に関わる推進性能と船体のスタビリティー(復原性能)を …

これまでの実験結果と想定しているロボット船への積載重量、波の …
できるだけ長時間航続できるような船体モデルを設計するために、 …

船に取り付ける計測器が、波により船と一緒に動揺することで、計 …